Regulator ciśnienia statycznego - instrukcja obsługi
Zadania regulatora ciśnienia statycznego
Regulator ciśnienia statycznego posiada następujące zadania:
Schemat układu technologicznego stabilizacji ciśnienia
Przedstawione poniżej rysunki są jedynie wersjami uproszczonymi schematu ciepłowni. Pełny schemat z zaznaczonymi wszystkimi elementami układu technologicznego można znaleźć pod adresem http://www.szarp.com.pl/schematy/chrzanow3.pdf.
Układ technologiczny stabilizacji ciśnienia ma różną postać w sezonie letnim i w sezonie grzewczym. Uproszczony schemat układu dla sezonu letniego przedstawiony jest poniżej:

|
(1.1) |
gdzie:
PSK - pompa stabilizacji obiegu kotłowego
PZG1, PZG2 - pompy mieszania gorącego pełniące w sezonie letnim rolę pomp obiegowych obiegu kotłowego
POL1, POL2, POL3, POL4 - pompy obiegowe letnie
PZZ1 - pompa mieszania zimnego - de facto nie jest to fizycznie istniejąca pompa, a jedna (lub więcej) z pomp POL
PSS - pompa stabilizacyjna
RS - reduktor ciśnienia
WL1, WL2 - wymienniki letnie obiegu miasta
Uproszczony schemat układu dla sezonu grzewczego przedstawiony jest poniżej:

|
(1.2) |
gdzie:
PZG1, PZG2 - pompy mieszania gorącego
PZG3 - pompa mieszania gorącego będąca jednocześnie pompą wysokiego parametru wymiennika Stella
PZZ1 - pompa mieszania zimnego
PO1, PO2 - pompy obiegowe
POS1, POS2 - pompy obiegowe obiegu Stella
POS, PSS - pompy stabilizacyjne
RS - reduktor ciśnienia obiegu Stella
WS1, WS2 - wymienniki obiegu Stella
Algorytm utrzymywania ciśnienia wody powrotnej z sieci
Utrzymywanie ciśnienia wody powrotnej z sieci Ppow na poziomie zbliżonym do zadanego ciśnienia wody powrotnej z sieci Podn odbywa się poprzez zmianę wysterowania falownika pompy stabilizującej imp_s. Zmiana tego wysterowania zależy od wielu parametrów i przebiega w kilku etapach. Algorytm tych zmian przedstawić można następująco:
1 | gradient = Ppow - Ppow 30s |
2 | |
3 | jeżeli |Ppow chwilowe - Podn| < 0.003 MPa |
4 | nie podejmuj regulacji |
5 | w przeciwnym wypadku jeżeli |Ppow - Podn| < 0.003 MPa |
6 | nie podejmuj regulacji |
7 | w przeciwnym wypadku jeżeli |Ppow - Podn| < 0.010 MPa |
8 | jeżeli Ppow chwilowe - Podn > 0 i gradient < 0.001 MPa |
9 | nie podejmuj regulacji |
10 | w przeciwnym wypadku jeżeli Ppow chwilowe - Podn < 0 i gradient > 0.002 MPa |
11 | nie podejmuj regulacji |
12 | w przeciwnym wypadku jeżeli |Ppow - Podn| < 0.015 MPa |
13 | jeżeli Ppow chwilowe - Podn > 0 i gradient < -0.002 MPa |
14 | nie podejmuj regulacji |
15 | w przeciwnym wypadku jeżeli Ppow chwilowe - Podn < 0 i gradient > 0.004 MPa |
16 | nie podejmuj regulacji |
17 | w przeciwnym wypadku jeżeli |Ppow - Podn| < 0.025 MPa |
18 | jeżeli Ppow chwilowe - Podn > 0 i gradient < -0.005 MPa |
19 | nie podejmuj regulacji |
20 | w przeciwnym wypadku jeżeli Ppow chwilowe - Podn < 0 i gradient > 0.008 MPa |
21 | nie podejmuj regulacji |
22 | w przeciwnym przypadku |
23 | jeżeli |Ppow - Podn| < 0.010 MPa |
24 | ustal skok zmiany wysterowania falownika imp_s na 0.3% (tj. 0.015 Hz) |
25 | jeżeli |Ppow - Podn| > 0.010 MPa i |Ppow - Podn < 0.015 MPa |
26 | ustal skok zmiany wysterowania falownika imp_s na 0.5% (tj. 0.025 Hz) |
27 | jeżeli |Ppow - Podn| > 0.015 MPa i |Ppow - Podn < 0.025 MPa |
28 | ustal skok zmiany wysterowania falownika imp_s na 0.6% (tj. 0.030 Hz) |
29 | jeżeli |Ppow - Podn| > 0.025 MPa |
30 | ustal skok zmiany wysterowania falownika imp_s na 1% (tj. 0.05 Hz) |
31 | |
32 | jeżeli Ppow - Podn < 0 i Ppow chwilowe - Podn < 0 |
33 | zwiększ wysterowanie falownika imp_s o ustalony wcześniej skok |
34 | w przeciwnym wypadku jeżeli Ppow - Podn > 0 i Ppow chwilowe - Podn > 0 |
35 | zmniejsz wysterowanie falownika imp_s o ustalony wcześniej skok |
gdzie:
Ppow - ciśnienie wody powrotnej z sieci (wartość średnia z ostatnich 20 sekund)
Ppow chwilowe - ciśnienie wody powrotnej z sieci (wartość chwilowa)
Ppow 30s - ciśnienie wody powrotnej z sieci (wartość sprzed 30 sekund)
Podn - zadanie ciśnienie wody powrotnej z sieci
imp_s - wysterowanie falownika pompy stabilizującej
gradient - wartość pomocnicza oznaczająca szybkość zmian ciśnienia. Podjęcie regulacji uzależnione jest nie tylko od aktualnej wartości ciśnienia wody powrotnej z sieci, ale też od kierunku i szybkości jego zmian. Ma to na celu kompensację bezwładności przyrządów pomiarowych, a co za tym idzie - ograniczenie możliwości wzbudzania się układu.
Regulacja jest podejmowana co 28 sekund. Zakres zmian wysterowania falownika pompy stabilizującej imp_s ustalono na od 40% do 100%.
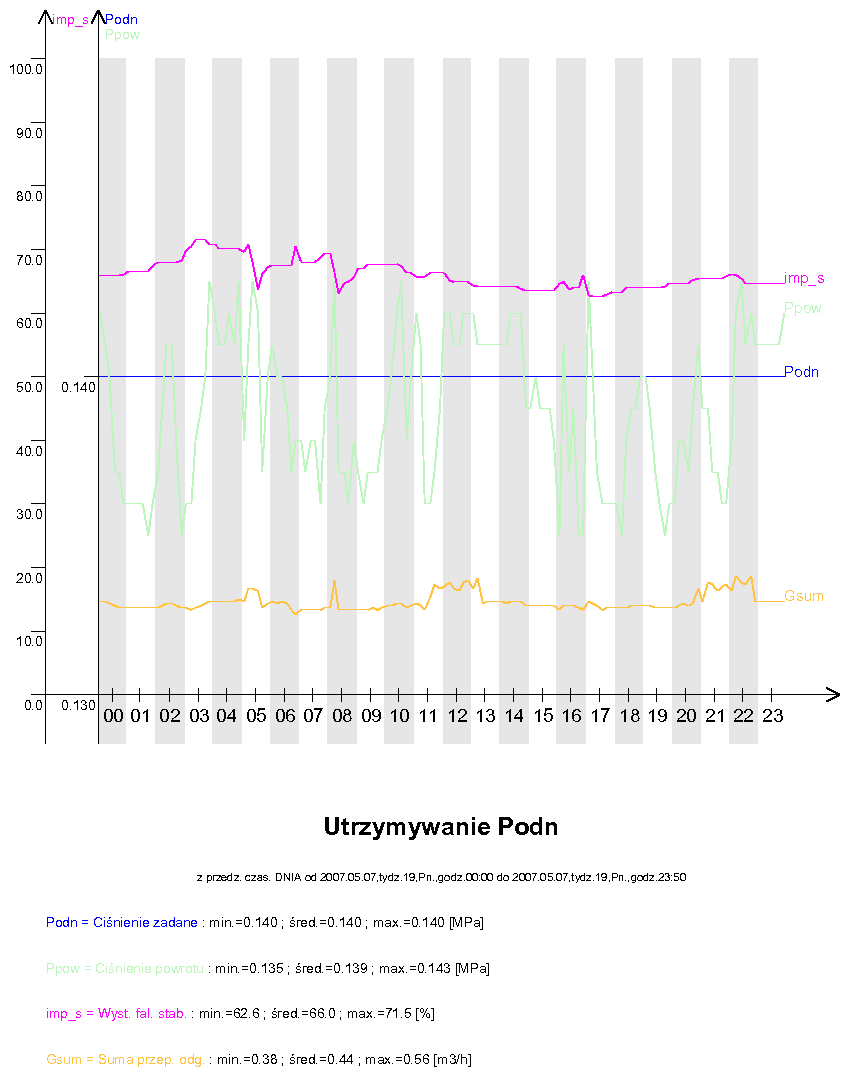
Przykład sterowania falownikiem pompy stabilizującej imp_s w celu utrzymania ciśnienia wody powrotnej z sieci Ppow na poziomie zbliżonym do zadanego ciśnienia wody powrotnej z sieci Podn przedstawiony jest na poniższym wykresie (jest to wykres pochodzący z PEC Pasłęk, ale jest on uniwersalnym przykładem dla wszystkich systemów, w których zastosowany jest opisany powyżej algorytm):
 |
(2.1) |
Na powyższym przykładzie widać, że regulator stara się utrzymywać ciśnienie wody powrotnej z sieci Ppow na poziomie jak najbardziej zbliżonym do zadanego ciśnienia wody powrotnej z sieci Podn. Widać również, iż wszelkie odchyłki ciśnienia wody powrotnej z sieci Ppow od zadanego ciśnienia wody powrotnej z sieci Podn skutkują natychmiastową zmianą wysterowania falownika pompy stabilizującej imp_s, dzięki czemu ciśnienie wody powrotnej z sieci Ppow znów zbliża się do zadanego ciśnienia wody powrotnej z sieci Podn.
Algorytm utrzymywania ciśnienia wody przed kotłami
Utrzymywanie ciśnienia wody przed kotłami Ppwk jest wykonywane tylko w niektórych systemach grupy Praterm i to tylko w sezonie letnim - wtedy kotły w tych systemach są w pełni odseparowane od odbiorców. Utrzymywanie ciśnienia wody przed kotłami Ppwk na poziomie zbliżonym do zadanego ciśnienia wody przed kotłami Podk odbywa się poprzez zmianę wysterowania falownika pompy stabilizującej obiegu kotłów imp_k. Zmiana tego wysterowania zależy od wielu parametrów i przebiega w kilku etapach. Algorytm tych zmian można przedstawić następująco:
1 | gradient = Ppwk - Ppwk 30s |
2 | |
3 | jeżeli |Ppwk chwilowe - Podk| < 0.003 MPa |
4 | nie podejmuj regulacji |
5 | w przeciwnym wypadku jeżeli |Ppwk - Podk| < 0.003 MPa |
6 | nie podejmuj regulacji |
7 | w przeciwnym wypadku jeżeli |Ppwk - Podk| < 0.010 MPa |
8 | jeżeli Ppwk chwilowe - Podk > 0 i gradient < -0.001 MPa |
9 | nie podejmuj regulacji |
10 | w przeciwnym wypadku jeżeli Ppwk chwilowe - Podk < 0 i gradient > 0.002 MPa |
11 | nie podejmuj regulacji |
12 | w przeciwnym wypadku jeżeli |Ppwk - Podk| < 0.015 MPa |
13 | jeżeli Ppwk chwilowe - Podk > 0 i gradient < -0.002 MPa |
14 | nie podejmuj regulacji |
15 | w przeciwnym wypadku jeżeli Ppwk chwilowe - Podk < 0 i gradient > 0.004 MPa |
16 | nie podejmuj regulacji |
17 | w przeciwnym wypadku jeżeli |Ppwk - Podk| < 0.025 MPa |
18 | jeżeli Ppwk chwilowe - Podk > 0 i gradient < -0.005 MPa |
19 | nie podejmuj regulacji |
20 | w przeciwnym wypadku jeżeli Ppwk chwilowe - Podk < 0 i gradient > 0.008 MPa |
21 | nie podejmuj regulacji |
22 | w przeciwnym przypadku |
23 | jeżeli |Ppwk - Podk| < 0.010 MPa |
24 | ustal skok zmiany wysterowania falownika imp_k na 0.3% (tj. 0.015 Hz) |
25 | jeżeli |Ppwk - Podk| > 0.010 MPa i |Ppwk - Podk < 0.015 MPa |
26 | ustal skok zmiany wysterowania falownika imp_k na 0.5% (tj. 0.025 Hz) |
27 | jeżeli |Ppwk - Podk| > 0.015 MPa i |Ppwk - Podk < 0.025 MPa |
28 | ustal skok zmiany wysterowania falownika imp_k na 0.6% (tj. 0.030 Hz) |
29 | jeżeli |Ppwk - Podk| > 0.025 MPa |
30 | ustal skok zmiany wysterowania falownika imp_k na 1% (tj. 0.05 Hz) |
31 | |
32 | jeżeli Ppwk - Podk < 0 i Ppwk chwilowe - Podk < 0 |
33 | zwiększ wysterowanie falownika imp_k o ustalony wcześniej skok |
34 | w przeciwnym wypadku jeżeli Ppwk - Podk > 0 i Ppwk chwilowe - Podk > 0 |
35 | zmniejsz wysterowanie falownika imp_k o ustalony wcześniej skok |
gdzie:
Ppwk - ciśnienie wody przed kotłami (wartość średnia z ostatnich 20 sekund)
Ppwk chwilowe - ciśnienie wody przed kotłami (wartość chwilowa)
Ppwk 30s - ciśnienie wody przed kotłami (wartość sprzed 30 sekund)
Podk - zadanie ciśnienie wody przed kotłami
imp_k - wysterowanie falownika pompy stabilizującej obiegu kotłów
gradient - wartość pomocnicza oznaczająca szybkość zmian ciśnienia. Podjęcie regulacji uzależnione jest nie tylko od aktualnej wartości ciśnienia wody przed kotłami, ale też od kierunku i szybkości jego zmian. Ma to na celu kompensację bezwładności przyrządów pomiarowych, a co za tym idzie - ograniczenie możliwości wzbudzania się układu.
Regulacja jest podejmowana co 30 sekund. Zakres zmian wysterowania falownika pompy stabilizującej obiegu kotłów imp_k ustalono na od 40% do 100%.
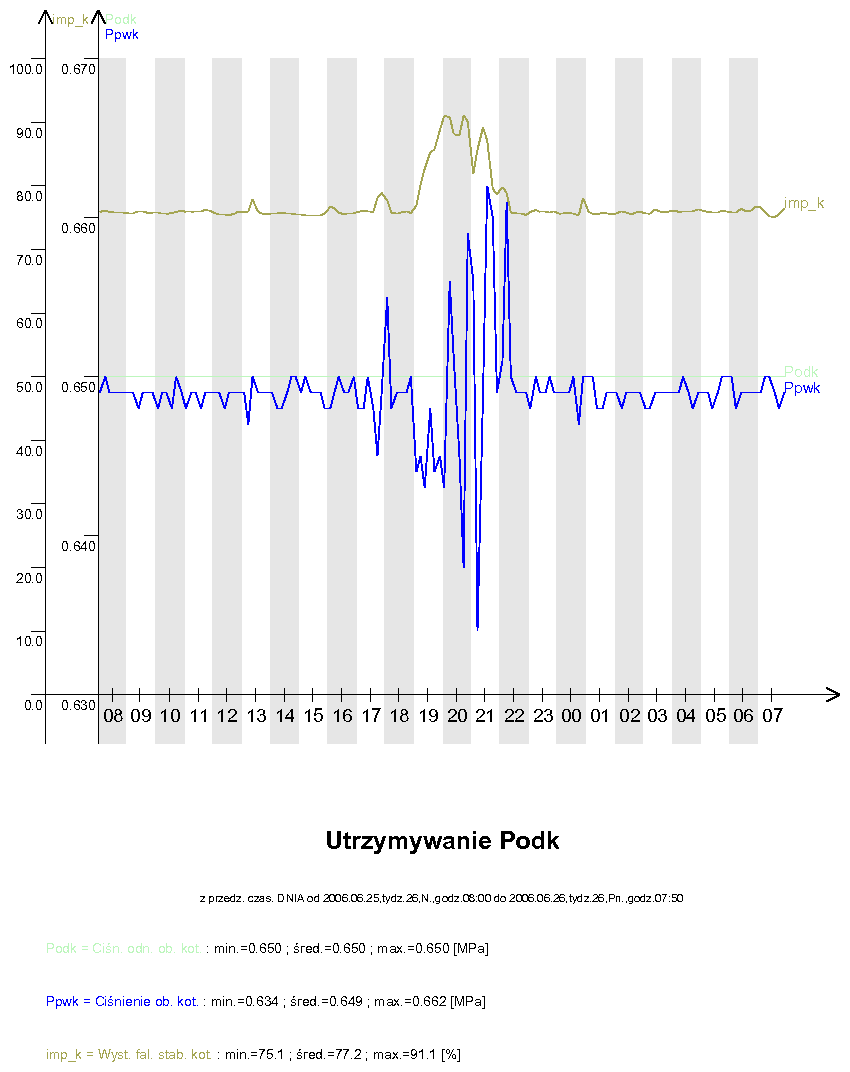
Przykład sterowania falownikiem pompy stabilizującej obiegu kotłów imp_k w celu utrzymania ciśnienia wody przed kotłami Ppwk na poziomie zbliżonym do zadanego ciśnienia wody przed kotłami Podk przedstawiony jest na poniższym wykresie (jest to wykres pochodzący z MPEC Tarnowskie Góry, ale jest on uniwersalnym przykładem dla wszystkich systemów, w których zastosowany jest opisany powyżej algorytm):
 |
(3.1) |
Na powyższym przykładzie widać, że regulator stara się utrzymywać ciśnienie wody przed kotłami Ppwk na poziomie jak najbardziej zbliżonym do zadanego ciśnienia wody przed kotłami Podk. Widać również, iż wszelkie odchyłki ciśnienia wody przed kotłami Ppwk od zadanego ciśnienia wody przed kotłami Podk skutkują natychmiastową zmianą wysterowania falownika pompy stabilizującej obiegu kotłów imp_k, dzięki czemu ciśnienie wody przed kotłami Ppwk znów zbliża się do zadanego ciśnienia wody przed kotłami Podk.
Algorytm utrzymywania przepływu wody powrotnej z sieci
Utrzymywanie przepływu wody powrotnej z sieci Gos ma na celu utrzymanie sumarycznego przepływu przez odgazowywacz Gsum na w miarę stabilnym poziomie, co powinno skutkować stabilnym dopływem wody do kolumny odgazowywacza, a tym samym zapewnieniem stabilnych warunków do przebiegu procesu odgazowania. Utrzymywanie przepływu wody powrotnej z sieci Gos na poziomie zbliżonym do przepływu wody powrotnej z sieci odniesienia Gxos (wyliczanego jako zadany dopływ wody do odgazowywacza Gsum pomniejszony o wartość aktualnego przepływu wody zmiękczonej Gwz) jest wykonywane poprzez regulację zaworem wody powrotnej z sieci. Sterowanie tym zaworem odbywa się w jednym z trzech trybów, wybieranym w zależności od aktualnego wysterowania falownika pompy stabilizującej imp_s:
Powodem zmiany sposobu sterowania w drugim i trzecim przypadku jest zmiana priorytetów: przy wysterowaniu falownika pompy stabilizującej imp_s większym niż 95% uzupełnianie zładu staje się ważniejsze niż stabilne odgazowanie - takie wysterowanie wskazuje na duże ubytki wody sieciowej.
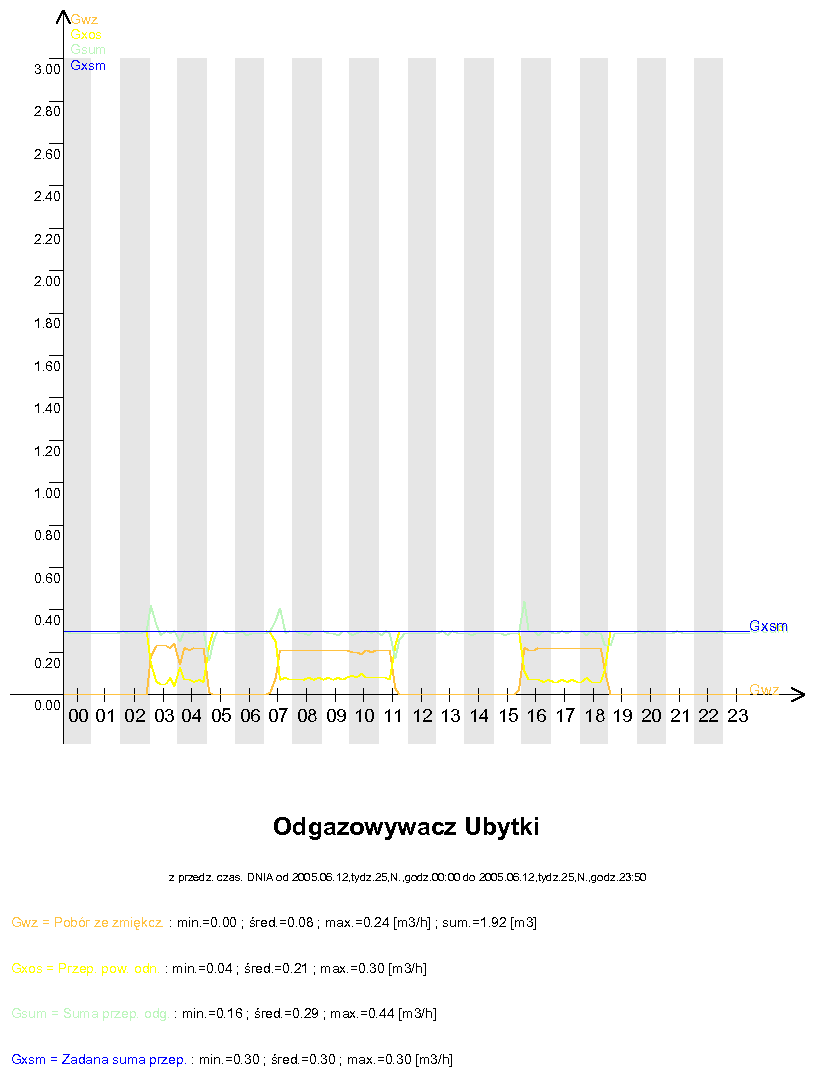
Przykład wyliczania przepływu wody powrotnej z sieci odniesienia Gxos przedstawiony jest na poniższym wykresie (jest to wykres pochodzący z PEC Pasłęk, ale jest on uniwersalnym przykładem dla wszystkich systemów, w których zastosowany jest opisany powyżej algorytm):
 |
(4.1) |
Na powyższym przykładzie widać, że wartość przepływu wody powrotnej z sieci odniesienia Gxos zmienia się przeciwnie do zmian aktualnego przepływu wody zmiękczonej Gwz tak, aby ich suma pozostała stała i równa zadanemu dopływowi wody do odgazowywacza Gxsm.
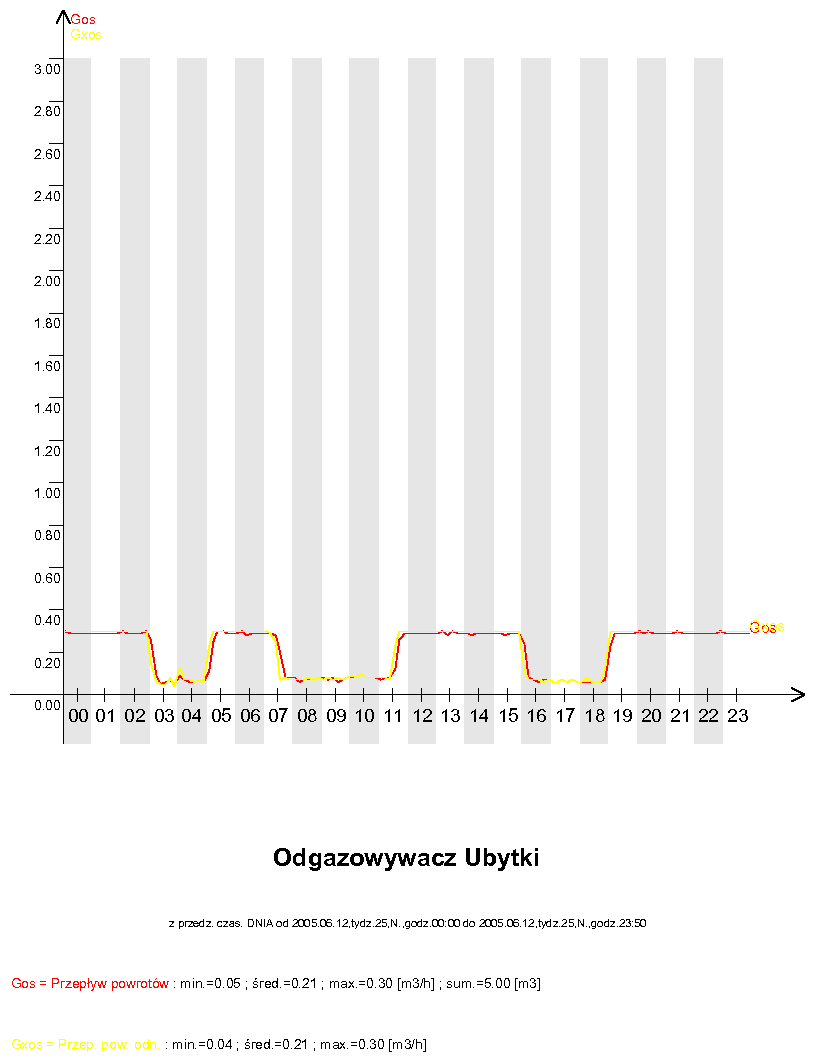
Przykład sterowania zaworem wody powrotnej z sieci w celu utrzymania przepływu wody powrotnej z sieci Gos na poziomie zbliżonym do przepływu wody powrotnej z sieci odniesienia Gxos przedstawiony jest na poniższym wykresie (jest to wykres pochodzący z PEC Pasłęk, ale jest on uniwersalnym przykładem dla wszystkich systemów, w których zastosowany jest opisany powyżej algorytm):
 |
(4.2) |
Na powyższym przykładzie widać, że wartość przepływu wody powrotnej z sieci Gos utrzymywana jest na poziomie zbliżonym do przepływu wody powrotnej z sieci odniesienia Gxos tak dokładnie, jak to tylko możliwe - wraz ze zmianami przepływu wody powrotnej odniesienia Gxos dokonywana jest taka regulacja zaworem wody powrotnej z sieci, aby przepływ wody powrotnej z sieci Gos podążał za zmienioną wartością przepływu wody powrotnej z sieci odniesienia Gxos.
Ograniczenie wysterowania pomp
Aby regulacja mogła odbywać się w sposób płynny (bez stref martwych) wysterowanie falowników pomp może zmieniać się jedynie w określonych granicach. Wartość minimalna wysterowania - jest to graniczna wartość wysterowania przy której pompa zaczyna tłoczyć wodę, powinna być wyznaczana doświadczalnie (tutaj została ustalona na 40%). Poniżej przedstawiony został przykład, który ilustruje zadziałanie tego ograniczenia:
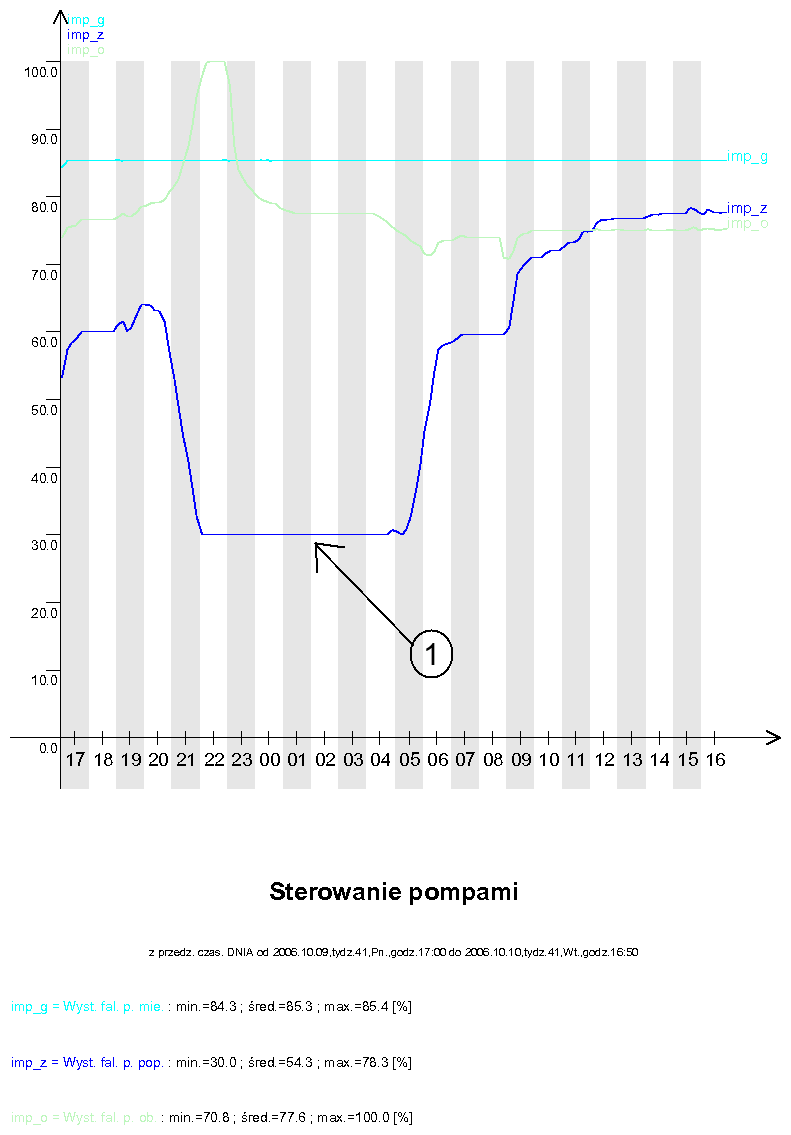 |
(rys.1) |
W miejscu oznaczonym 1 widać, że falownik pompy (tu: falownik pompy poprzecznej) osiągnął swoje minimalne wysterowanie (tu: ustawione na 30%). Wartość tego wysterowania nie spada poniżej tej wartości, zgodnie z opisem powyżej.
Znaczenie poszczególnych funkcji
Wyświetlacz stały [TEMPERATURA WYJ] - ciśnienie powrotu głównego - Pomiar prądowy 4..20mA, wejście 1.
00 - zadane cisnienie statyczne: x.xxx [MPa] - Programowalna wartość ciśnienia wody powrotnej z sieci (funkcja 12), która ma być utrzymywana.
02 - wysterowanie falownika pompy stabilizującej: xxx.x [%] - Sygnał prądowy wychodzący z regulatora (wyjście prądowe nr 1). W trybie pracy ręcznej regulator nie steruje falownikiem pompy stabilizacyjnej - elektrycznie obwód zamknięty jest w ten sposób, że sygnał prądowy z zadajnika w szafie jest wprost (z pominięciem sterownika) podawany na wejście prądowe falownika pompy stabilizacyjnej. W trybie synchronizacji sygnał prądowy na wyjściu prądowym nr 1 jest równy wysterowaniu z zadajnika falownika pompy stabilizacyjnej - sygnałowi prądowemu na wejściu analogowym nr 5, wyświetlanemu na funkcji 03, dlatego też wskazania na funkcjach 02 i 03 pokrywają się. W trybie pracy automatycznej wartość wysterowania jest dobierana przez algorytm sterowania. Wartość wysterowania może być zmieniana w granicach od 40% do 100%.
03 - wysterowanie falownika pompy stabilizującej z zadajnika: xxx.x [%] - Sygnał prądowy z zadajnika 4-20mA. W trybie pracy ręcznej nie jest pokazywany, ponieważ obwód jest elektrycznie zamknięty z pominięciem sterownika i sygnał z zadajnika jest wysyłany prosto do falownika. Potencjometr zadajnika jest dziesięcioobrotowy, jedna działka na potencjometrze odpowiada 1% wysterowania (0.05Hz).
04 - wysterowanie falownika pompy stabilizującej obiegu kotłowego: xxx.x [%] - Jest to odpowiednik funkcji 02 dla falownika pompy stabilizacyjnej obiegu kotłów.
05 - wysterowanie falownika pompy stabilizującej obiegu kotłowego z zadajnika: xxx.x [%] - Jest to odpowiednik funkcji 03 dla falownika pompy stabilizacyjnej obiegu kotłów.
10 - zadane cisnienie statyczne obiegu kotłowego [MPa] - Programowalna wartość ciśnienia wody powrotnej obiegu kotłów (funkcja 11), która ma być utrzymana.
11 - aktualne cisnienie statyczne obiegu kotłowego [MPa] - Wartość mierzona w przetworniku ciśnienia, a odbierana przez regulator na pierwszym wejściu analogowym.
12 - cisnienie powrotu: x.xxx [MPa] - Wartość mierzona w przetworniku ciśnienia, a odbierana przez regulator na drugim wejściu analogowym.
40 - sumaryczny zadany przeplyw do odgazowywacza: xx.xx [m3/h] - Wartość programowalna oznaczająca sumę przepływu wody powrotnej z sieci (funkcja 51) oraz przepływu wody zmiękczonej (funkcja 52) do utrzymania.
41 - sumaryczny przeplyw do odgazowywacza: xx.xx [m3/h] - Wartość wyliczana jako suma wartości pomiarów przepływu wody powrotnej z sieci (funkcja 51) oraz przepływu wody zmiękczonej (wartość mierzona w sterowniku odgazowywacza i wyświetlana na funkcji 52).
50 - zadany przeplyw powrotow: xx.xx [m3/h] - Wartość wyliczana zgodnie z algorytmem utrzymywania przepływu wody powrotnej z sieci.
51 - przeplyw powrotow: xx.xx [m3/h] - Wartość mierzona w wodomierzu, a odbierana przez regulator na wejściu impulsowym nr 4.
52 - przeplyw wody zmiekczonej: xx.xx [m3/h] - Wartość mierzona w sterowniku odgazowywacza.
53 - Sumaryczny przeplyw wody ze zbiornika wody odgz. [m3/h] - Wartość ta jest wyliczana jako suma wartości parametrów z funkcji 54 i 55.
54 - I przeplyw wody ze zbiornika wody odgz. [m3/h] - Wartość mierzona w wodomierzu, a odbierana przez regulator na wejściu impulsowym nr 5.
55 - I przeplyw wody ze zbiornika wody odgz. [m3/h] - Wartość mierzona w wodomierzu, a odbierana przez regulator na wejściu impulsowym nr 2.
56 - przepływ uzupełniania kotłów [m3/h] - Wartość mierzona w wodomierzu, a odbierana przez regulator na wejściu impulsowym nr 3.
70 - temperatura wody zmiękczonej [°C] - Pomiar mierzony czujnikiem Pt100 (zakres przetwarzania 0..200°C) odbierany przez regulator na wejściu analogowym nr 10.
71 - temperatura za podgrz. wody zmiękczonej w.p. [°C] - Pomiar mierzony czujnikiem Pt100 (zakres przetwarzania 0..200°C) odbierany przez regulator na wejściu analogowym nr 11.
72 - temperatura wody za wymiennikiem gorącym - wysoki parametr [°C] - Pomiar mierzony czujnikiem Pt100 (zakres przetwarzania 0..200°C) odbierany przez regulator na wejściu analogowym nr 12.
82 - Temperatura wody zmiękczonej przed podgrzewaczem n.p. - Pomiar mierzony czujnikiem Pt100 (zakres przetwarzania 0..200°C) odbierany przez regulator na wejściu analogowym nr 9.
90 - czas ruchu zaworem powrotow - Wartość programowalna pozwalająca ustawić czas trwania ruchu zaworem wody powrotnej z sieci w momencie podejmowania regulacji.
97 - Stan wejść logicznych 1-4 - Każda cyfra na wyświetlaczu odpowiada stanowi wejścia logicznego: pierwsza - wejście 1, druga - wejście 2, trzecia - wejście 3, czwarta - wejście 4. Stan "0" oznacza wejście rozwarte, stan "1" oznacza wejście zwarte.
98 - Stan wejść logicznych 5-8 - Jak funkcja 97, ale cyfry na wyświetlaczu odpowiadają wejściom logicznym: pierwsza - wejście 5, druga - wejście 6, trzecia - wejście 7, czwarta - wejście 8.
Panel wyświetlaczy nr 2, pozycja na wyświetlaczu: 1 - przeplyw powrotu - Wartość mierzona w wodomierzu, a odbierana przez regulator na wejściu impulsowym nr 4.
Panel wyświetlaczy nr 2, pozycja na wyświetlaczu: 2 - przeplyw wody zmiekczonej - Wartość mierzona w sterowniku odgazowywacza.
Panel wyświetlaczy nr 2, pozycja na wyświetlaczu: 3 - sumaryczny przeplyw do odgazowywacza - Wartość wyliczana jako suma wartości pomiarów przepływu wody powrotnej z sieci (funkcja 51) oraz przepływu wody zmiękczonej (wartość mierzona w sterowniku odgazowywacza i wyświetlana na funkcji 52).
Panel wyświetlaczy nr 2, pozycja na wyświetlaczu: 4 - rezerwa / [WYŚWIETLANE NAPRZEMIENNIE] / Przepływ uzupełniania - Rezerwa [WYŚWIETLANE NAPRZEMIENNIE] Wartość ta jest wyliczana jako suma wartości parametrów z funkcji 54 i 55.
Ogólne uwagi na temat obsługi sterownika
Na szafie regulatora znajduje się przełącznik zmiany trybu pracy, który pozwala na przechodzenie pomiędzy trybami: 1 - sterowanie ręczne, 2 - praca w synchronizacji, 3 - praca automatyczna. Poszczególne tryby pracy wiążą się nie tylko z rozkazami wydawanymi do sterownika, ale także z połączeniami elektrycznymi wewnątrz szafy. W szafie regulatora mogą znajdować się przyciski: kasowania awarii i kontroli sygnalizacji (nie występują one we wszystkich szafach). W przypadku zaistnienia awarii odpowiednia lampka na szafie regulatora mruga i ewentualnie towarzyszy temu sygnał dźwiękowy. Kasowanie awarii powoduje, że sygnał dźwiękowy zostaje wyłączony, a lampka świeci się światłem ciągłym - jeśli stan awaryjny, który spowodował jej załączenie, wciąż trwa - lub gaśnie - jeśli stan awaryjny minął. W przypadku zaistnienia stanu awaryjnego powtórne załączenie sygnału dźwiękowego wymaga więc skasowania awarii przez naciśnięcie przycisku, ustąpienia stanu awaryjnego i jego powtórnego zaistnienia. Kontrola sygnalizacji ma na celu sprawdzenie, czy wszystkie lampki i sygnalizacja dźwiękowa są sprawne - naciśnięcie tego przycisku powoduje załączenie wszystkich lampek na czas jego przyciśnięcia.
Tryby pracy regulatora oraz przełączanie między nimi
Regulator może pracować w jednym z trzech trybów pracy, które są wybierane przy pomocy trójpozycyjnego przełącznika. Dostępne są następujące tryby pracy:
Przełączanie z trybu pracy ręcznej do trybu synchronizacji jest kłopotliwym przełączeniem. W trybie synchronizacji regulator powiela sygnał z wejścia analogowego na wyjście prądowe, a w trybie pracy ręcznej jest elektrycznie odcięty od sygnałów z zadajników, dlatego też, zanim regulator zacznie prawidłowo powtarzać sygnał do falowników, musi go dokładnie zmierzyć. Z uwagi na filtracje przeciwzakłóceniowe dokładny pomiar sygnału prądowego z zadajnika zajmuje kilka sekund od momentu jego elektrycznego podłączenia do regulatora, które ma miejsce w tym przełączeniu. W przypadku źle zaprogramowanych falowników (jeśli zamiast lotnego startu mają ustawiony start po całkowitym zatrzymaniu) lub zaprogramowanego zbyt krótkiego czasu zwalniania (poniżej 10 sekund) przy zaniku prądowego sygnału sterującego, przełączenie to może nawet doprowadzić do chwilowego odstawienia falowników. Wówczas należy natychmiast załączyć je ponownie. Przełączenie to nie wymaga dodatkowych operacji.
Przełączanie z trybu synchronizacji do trybu pracy ręcznej jest operacją nie wymagającą żadnych dodatkowych czynności. Przełączenie inaczej niż w powyższym przypadku praktycznie nie powoduje zaniku sygnału sterującego wysyłanego do falowników - elektryczne odcięcie sterownika z obwodu regulacji odbywa się na tyle szybko, że pozostaje właściwie niezauważone przez falowniki.
Przełączanie z trybu synchronizacji do trybu pracy automatycznej może wiązać się z gwałtowną zmianą wysterowania falowników pomp poprzecznych i obiegowych, gdy zadane wartości wysterowań nie są prawidłowo ustawione. Aby przełączenie było łagodne, należy sprawdzić poprawność wszystkich parametrów jeszcze w trybie synchronizacji.
Asysta przy zdalnej zmianie programu regulatora
Część parametrów takich, jak zakresy przyrządów pomiarowych oraz konfiguracje programu takie, jak kolejność wyświetlania parametrów, niektóre progi zapalania lampek alarmowych itp. są trwale zakodowane w programie sterownika. Nie można tego zmienić z poziomu obsługi (programowania parametrów stałych czy paczek czasowych), ponieważ są to zbyt newralgiczne dla działania regulatora wielkości. Takie zmiany występują stosunkowo rzadko. Zmiana programu regulatora zwykle prowadzona jest bezpośrednio przez pracowników firmy Praterm. Polega ona na podłączeniu notebooka kablem modemowym do RS232/0 sterownika i uruchomieniu na notebooku odpowiedniego programu. Ta operacja jednak może też zostać przeprowadzona z wykorzystaniem serwera SZARP, który w normalnej pracy jest podłączony przez RS232/0 do sterownika w celu zbierania i rejestracji danych. Pracownicy firmy Praterm mogą zdalnie - z wykorzystaniem Internetu - na serwerze SZARP uruchomić program do zmiany programu regulatora, fizycznie nie będąc przy sterowniku. Dzięki temu przy ewentualnej konieczności zmiany programu (np. po wymianie uszkodzonego przetwornika pomiarowego na nowy o innym zakresie) możliwa jest szybka operacja zmiany, bez konieczności przyjazdu na miejsce. Zdalna zmiana programu regulatora wymaga pomocy pracowników obsługi znajdującej się bezpośrednio przy sterowniku:
Wartości wyświetlane
| numer | opis |
| stały wyświetlacz | ciśnienie powrotu głównego |
| nE | Wersja pamięci EPROM: 3001 |
| nL | numer wersji biblioteki |
| nb | numer kompilacji biblioteki |
| nP | Wersja programu technologicznego: 3013 |
| 00 | zadane cisnienie statyczne: x.xxx [MPa] |
| 01 | programowana tolerancja alarmu od ciśnienia statycznego |
| 02 | wysterowanie falownika pompy stabilizującej: xxx.x [%] |
| 03 | wysterowanie falownika pompy stabilizującej z zadajnika: xxx.x [%] |
| 04 | wysterowanie falownika pompy stabilizującej obiegu kotłowego: xxx.x [%] |
| 05 | wysterowanie falownika pompy stabilizującej obiegu kotłowego z zadajnika: xxx.x [%] |
| 10 | zadane cisnienie statyczne obiegu kotłowego [MPa] |
| 11 | aktualne cisnienie statyczne obiegu kotłowego [MPa] |
| 12 | cisnienie powrotu: x.xxx [MPa] |
| 40 | sumaryczny zadany przeplyw do odgazowywacza: xx.xx [m3/h] |
| 41 | sumaryczny przeplyw do odgazowywacza: xx.xx [m3/h] |
| 50 | zadany przeplyw powrotow: xx.xx [m3/h] |
| 51 | przeplyw powrotow: xx.xx [m3/h] |
| 52 | przeplyw wody zmiekczonej: xx.xx [m3/h] |
| 53 | Sumaryczny przeplyw wody ze zbiornika wody odgz. [m3/h] |
| 54 | I przeplyw wody ze zbiornika wody odgz. [m3/h] |
| 55 | I przeplyw wody ze zbiornika wody odgz. [m3/h] |
| 56 | przepływ uzupełniania kotłów [m3/h] |
| 60 | Ciśnienie wody gorącej [kPa] |
| 61 | Ciśnienie za podgrz. wody uzdatnionej w.p. [kPa] |
| 62 | ciśnienie przed wymiennikiem gorącym n.p. [kPa] |
| 63 | Ciśnienie za wymiennikiem gorącym w.p. [kPa] |
| 70 | temperatura wody zmiękczonej [°C] |
| 71 | temperatura za podgrz. wody zmiękczonej w.p. [°C] |
| 72 | temperatura wody za wymiennikiem gorącym - wysoki parametr [°C] |
| 82 | Temperatura wody zmiękczonej przed podgrzewaczem n.p. |
| 90 | czas ruchu zaworem powrotow |
| 97 | Stan wejść logicznych 1-4 |
| 98 | Stan wejść logicznych 5-8 |
Panele wyświetlaczy
| przeplyw powrotu | przeplyw wody zmiekczonej |
| sumaryczny przeplyw do odgazowywacza | rezerwa / Przepływ uzupełniania |
Wartości stałe
| numer | minimalna wartość | maksymalna wartość | domyślna wartość | opis |
| 00 | 0,100 | 0,700 | 0,400 | ciśnienie powrotów do utrzymania |
| 01 | 0,010 | 0,200 | 0,050 | programowana tolerancja alarmu od ciśnienia statycznego |
| 10 | 0,100 | 0,700 | 0,550 | ciśnienie powrotów obiegu kotłowego do utrzymania |
| 40 | 0,0 | 9,9 | 3,0 | sumaryczny dopływ wody do odgazowywacza do utrzymania |
| 90 | 0,1 | 0,9 | 0,5 | długość impulsu zaworu wody z powrotów |
Wejścia analogowe
| numer | opis |
| 01 | ciśnienie powrotu głównego (4..20mA) |
| 02 | cisnienie powrotu obiegu kotłowego (4..20mA) |
| 03 | ciśninie za podgrzewaczem wody zmiękczonej w.p. (4..20mA) |
| 04 | Ciśnienie wody gorącej (4..20mA) |
| 05 | zadajnik falownika pompy stabilizującej (0..20mA) |
| 06 | zadajnik falownika pompy stabilizującej obiegu kotłowego (0..20mA) |
| 07 | Ciśnienie przed wymiennikiem gorącym n.p. (4..20mA) |
| 08 | Ciśnienie za wymiennikiem gorącym w.p. (4..20mA) |
| 09 | temperatura przed podgrzewaczem wody zmiękczonej n.p. (0..200°C) |
| 10 | Temperatura wody zmiękczonej (0..200°C) |
| 11 | Temperatura za podgrzewaczem wody zmiękczonej w.p. (0..200°C) |
| 12 | Temperatua za wymiennikiem gorącym w.p. (0..200°C) |
Wejścia logiczne
| numer | opis |
| 01 | praca automatyczna |
| 02 | synchronizacja |
| 03 | wodomierz przepływu powrotów |
| 04 | rezerwa |
| 05 | rezerwa |
| 06 | rezerwa |
| 07 | rezerwa |
| 08 | rezerwa |
Wyjścia analogowe
| numer | opis |
| 01 | wysterowanie falownika pompy stabilizującej |
| 02 | wysterowanie falownika pompy stabilizującej obiegu kotłowego |
| 03 | rezerwa |
Wyjścia przekaźnikowe
| numer | opis |
| 01 | praca automatyczna |
| 02 | otwieranie zaworu |
| 03 | zamykanie zaworu mieszania |
| 04 | Ostrzeżenie przed nadmierną różnicą ciśnienia statycznego |
| 05 | rezerwa |
| 06 | rezerwa |
| 07 | rezerwa |
| 08 | rezerwa |
| 09 | koniec zakresu regulacji cisnienia |
| 10 | rezerwa |
| 11 | sygnalizacja braku transmisji |
| 12 | minimalne wysterowanie pompy |
| 13 | rezerwa |
| 14 | rezerwa |
| 15 | rezerwa |
| 16 | buczek |
| 17 | rezerwa |
Instrukcja obsługi regulatora Z-Elektronik
Instrukcja obsługi panelu blokad
Deklaracja zgodności CE regulatora Z-Elektronik
Automatically generated by DOCGEN on 2026.05.30 03:23:36
based on /var/szarp/programy/trunk/chrzanow/sterow/3001/ciszwyk.c